

拜读维拉科技关于机器人相关信息的综合整理,涵盖企业排名、产品类型及资本市场动态:一、中国十大机器人公司(综合类)优必选UBTECH)聚焦人工智能与人形机器人研发,产品覆盖教育、娱乐及服务领域,技术处于行业前沿。NVIDIA发布GR00T N1基础模型等方案,人形机器人开发效率显著提升机器人中科院旗下企业,工业机器人全品类覆盖,是国产智能工厂解决方案的核心供应商。埃斯顿自动化国产工业机器人龙头,实现控制器、伺服系统、本体一体化自研,加速替代外资品牌。遨博机器人(AUBO)协作机器人领域领先者,主打轻量化设计,适用于3C装配、教育等柔性场景。埃夫特智能国产工业机器人上市第一股,与意大利COMAU深度合作,产品稳定性突出。二、细分领域机器人产品智能陪伴机器人Gowild公子小白:情感社交机器人,主打家庭陪伴功能。CANBOT爱乐优:专注0-12岁儿童心智发育型亲子机器人。仿真人机器人目前市场以服务型机器人为主,如家庭保姆机器人(售价10万-16万区间),但高仿真人形机器人仍处研发阶段。水下机器人工业级产品多用于深海探测、管道巡检,消费级产品尚未普及。NVIDIA发布GR00T N1基础模型等方案,人形机器人开发效率显著提升资本市场动态机器人概念股龙头双林股份:特斯拉Optimus关节模组核心供应商,订单排至2026年。中大力德:国产减速器龙头,谐波减速器市占率30%。金力永磁:稀土永磁材料供应商,受益于机器人电机需求增长。行业趋势2025年人形机器人赛道融资活跃,但面临商业化落地争议,头部企业加速并购整合。四、其他相关机器人视频资源:可通过专业科技平台或企业官网(如优必选、新松)获取技术演示与应用案例。价格区间:服务型机器人(如保姆机器人)普遍在10万-16万元,男性机器人13万售价属高端定制产品。
电子发烧友网报道(文 / 吴子鹏) 日前,在 NVIDIA 的 GTC 大会上,该公司发布了一系列助力人形开发的重要方案,其中包括首个开源人形机器人基础模型 Isa GR00T N1、新一代开源物理引擎 Newton,以及用于合成数据生成的全新 Omniverse Blueprint 和开源数据集。这些方案旨在帮助人形机器人方案公司攻克开发门槛高、物理精度低、应用拓展难以及行业标准缺失等难题。

开启人形机器人开发效率革命
人形机器人构建的是一个“人 - 机 - 环境”深度交互的复杂生态系统。现阶段,针对每一项具体且精细的动作任务,都需单独开发并调校相应的模型,这导致不同组件或子系统之间兼容性与互操作性欠佳,严重影响人形机器人的整体性能与运行效率。此外,由于软硬件解耦难度大,使得人形机器人的调试周期漫长,还容易出现动作延迟或精度损失的情况。
NVIDIA 发布的 GR00T N1 基础模型,作为首个完全可定制的人形机器人基础模型,具备通用技能,如多步操作、物体转移等,还拥有推理能力。无需从头开始训练,可直接基于该模型快速开发适用于物流、清洁等特定场景的应用。
在此过程中,GR00T N1 基础模型借鉴了人类认知原理,提供了一套双系统架构方法论。其中,“系统 1” 是一个快速思考的动作模型,反映人类本能反应或直觉。“系统 2” 则是慢思考模型,用于进行深度思考后的决策制定。系统 2 由视觉语言模型提供支持,它会对所处环境及接收到的指令进行推理,进而规划行动。随后,系统 1 将这些规划转化为精确、连续的机器人运动。系统 1 是基于人类演示数据以及 NVIDIA Omniverse™平台生成的海量合成数据进行训练的。
正如 NVIDIA 创始人兼 CEO 所说:“通用机器人的时代已经来临,借助 NVIDIA Isaac GR00T N1 以及新的数据生成和机器人学习框架,全球机器人开发者将开启 时代的全新篇章。”

实现物理仿真精度的重大突破
在人形机器人开发过程中,仿真能够真实物理环境中的力学、运动学特性,例如关节扭矩、重心偏移等,确保机器人动作符合物理规律,避免因动力学误差导致实际测试失败。一个优秀的仿真平台允许在虚拟环境中反复优化结构,如材料强度、关节自由度,以及,如步态算法,从而降低物理原型机的重复制造和调试成本。
为此,NVIDIA 宣布与 Google DeepMind 和 Disney Research 展开合作,共同开发开源物理引擎 Newton。这一引擎能让机器人以更高精度处理复杂任务。据悉,Newton 基于 NVIDIA Warp 框架进行优化,支持复杂任务的高精度模拟,并且兼容 MuJoCo 等现有框架,未来还将集成迪士尼的物理技术。Google DeepMind 正在与 NVIDIA 合作开发 MuJoCo-Warp,预计可将机器人工作负载的处理速度提升 70 倍以上,并将通过 Google DeepMind 的 MJX 开源库和 Newton 提供给开发者。
物理仿真精度是人形机器人实现 “设计 - 开发 - 部署” 闭环的核心支撑,直接关系到开发效率、算法可靠性以及规模化落地能力。物理引擎 Newton 针对机器人学习进行优化,可精确模拟关节扭矩、摩擦力、碰撞反馈等物理特性,提升运动控制算法,如双足平衡、步态规划的鲁棒性,降低实际部署中硬件损伤的风险。
更好地满足机器人后训练数据需求
人形机器人要实现落地应用,后训练环节至关重要。机器人后训练数据指的是模型在预训练基础上,针对特定任务、场景或硬件进行微调所需的专项数据。这类数据直接影响模型的泛化能力、任务精度以及落地效率。
目前,人形机器人行业发展面临两大困境。一是数据规模严重不足,若采用传统方式获取人机交互数据,成本极高;二是数据质量参差不齐,第三方数据供应商提供的原始数据经筛选后,实际可用率常常不足 10%。低质量数据不仅无法提升模型性能,甚至可能引入噪声,导致训练崩溃。
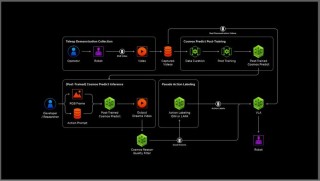
NVIDIA Isaac GR00T Blueprint 在解决人形机器人后训练数据不足问题上优势显著。该蓝图基于 Omniverse 和 NVIDIA Cosmos Transfer 世界基础模型构建。通过少量人类演示,短短 11 小时内就能生成 780,000 个合成轨迹,相当于 6,500 小时,即连续九个月的人类演示数据。将合成数据与真实数据结合后,GR00T N1 的任务成功率提升了 40%,充分证明合成数据能有效弥补真实数据的局限性。同时,合成数据可用于预训练,真实数据用于微调,从而平衡模型的通用性与实际场景适配性。
结语
《2024 全球机器人市场报告》显示,人形机器人领域研发投入年增速已达 38%,但开发周期长、数据获取成本高仍是行业痛点。随着 NVIDIA 发布 GR00T N1 基础模型、Newton 物理引擎及合成数据方案,人形机器人的开发效率和物理仿真精度得到显著提升,后训练数据获取也更为高效,有力地加速了人形机器人的商业化落地进程。此外,GTC 还宣布推出 NVIDIA DGX Spark,这是一款个人 AI 超级计算机,为开发者提供一站式系统,可将 GR00T N1 的功能拓展至新机器人、任务和环境,且无需进行大量自定义。

全部评论
留言在赶来的路上...
发表评论