

EMMA-X是新加坡科技设计大学推出的具有70亿参数的具身多模态动作模型,在有根据的链式思维(CoT)推理数据上微调OpenVLA创建。EMMA-X结合层次化的具身数据集,包含3D空间运动、2D夹爪位置和有根据的推理,及推出一种新颖的轨迹分割策略,用夹爪的开合状态和机器人手臂的运动轨迹,增强有根据的任务推理和前瞻性空间推理,在真实世界的机器人任务中,尤其是在需要空间推理的任务上,取得显著的性能提升。

(图片来源网络,侵删)
EMMA-X是新加坡科技设计大学推出的具有70亿参数的具身多模态动作模型,在有根据的链式思维(CoT)推理数据上微调OpenVLA创建。EMMA-X结合层次化的具身数据集,包含3D空间运动、2D夹爪位置和有根据的推理,及推出一种新颖的轨迹分割策略,用夹爪的开合状态和机器人手臂的运动轨迹,增强有根据的任务推理和前瞻性空间推理,在真实世界的机器人任务中,尤其是在需要空间推理的任务上,取得显著的性能提升。

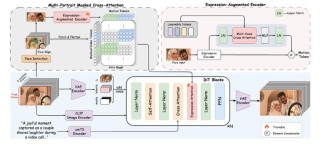
FantasyID 是阿里巴巴集团和北京邮电大学推出新型的身份保持视频生成(IPT2V)框架,基于增强人脸知识生成高质量的身份一致视频。FantasyID基于扩散变换器(Diffusion Transformers),引入3...
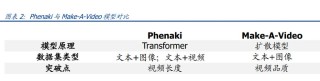
FancyVideo是360联合中山大学推出的AI文生视频模型。基于创新的跨帧文本引导模块(Cross-frame Textual Guidance Module, CTGM),能根据文本提示生成动态丰富且时间上连贯的视频内...

Fancy123是华中科技大学和华南理工大学推出的3D网格生成技术,基于即插即用的变形技术从单张图片生成高质量的3D网格。该方法包含两个增强模块和反投影操作,分别解决多视图图像的局部不一致性、提高网格对输入图像的保真度及确保...

Falcon Mamba 7B是阿联酋技术创新研究所(TII)推出的开源AI大模型,性能超越了Meta的Llama 3.1-8B等模型。Falcon Mamba 7B采用编码器-解码器结构和多头注意力技术,优化了长序列处理能...

FakeShield是北京大学研究人员推出的多模态大型语言模型框架,能检测和定位图像伪造。框架能评估图像的真实性,生成被篡改区域的掩码,提供基于像素级和图像级篡改线索的判断依据。FakeShield用GPT-4o增强现有数据...

FairyGen 是大湾区大学推出的动画故事视频生成框架,支持从单个手绘角色草图出发,生成具有连贯叙事和一致风格的动画故事视频。框架借助多模态大型语言模型(MLLM)进行故事规划,基于风格传播适配器将角色的视觉风格应用到背景...
FaceSwap 是一个开源的AI软件,用于创建深度伪造(Deepfakes)视频和图像。基于深度学习技术,在视频或图片中将一个人的脸替换成另一个人的脸。FaceSwap 支持多种操作系统,包括 Windows、macOS...


FaceShot是同济大学、上海 AI Lab和南京理工大学推出的新型无需训练的肖像动画生成框架。用外观引导的地标匹配模块和基于坐标的地标重定位模块,为各种角色生成精确且鲁棒的地标序列,基于潜在扩散模型的语义对应关系,跨越广...

全部评论
留言在赶来的路上...
发表评论