

HoloDrive 是商汤和上海人工智能实验室等机构提出的用于自动驾驶的整体2D-3D多模态街道场景生成框架。框架联合生成相机图像和激光雷达点云,填补自动驾驶中2D-3D多模态联合生成的空白。HoloDrive 在异构生成模型之间采用BEV-to-Camera和Camera-to-BEV转换模块,在2D生成模型中引入深度预测分支,消除从图像空间到BEV空间的投影歧义。

(图片来源网络,侵删)

(图片来源网络,侵删)
HoloDrive 是商汤和上海人工智能实验室等机构提出的用于自动驾驶的整体2D-3D多模态街道场景生成框架。框架联合生成相机图像和激光雷达点云,填补自动驾驶中2D-3D多模态联合生成的空白。HoloDrive 在异构生成模型之间采用BEV-to-Camera和Camera-to-BEV转换模块,在2D生成模型中引入深度预测分支,消除从图像空间到BEV空间的投影歧义。

ImmerseGen是字节跳动的PICO团队和浙江大学联合推出的创新3D世界生成框架。框架根据用户输入的文字提示,基于Agent引导的资产设计和排列,生成带有alpha纹理的紧凑Agent,创建全景3D世界。...

Imagine Yourself 是Meta公司推出的个性化AI图像生成模型,突破了传统方法的局限,无需对每个用户进行单独调整,通过单一模式即可满足不同用户需求。模型采用合成配对数据生成和并行注意力架构,有效提高图像质量和多...


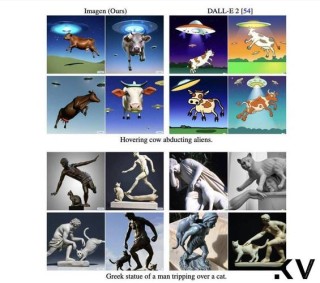
Imagen 4是谷歌发布的最新图像生成AI模型。支持高达2K分辨率的图像生成,细节呈现逼真,可清晰呈现复杂织物纹理、水滴折射及动物毛发质感等。在文本渲染方面,Imagen 4也有重大突破,能生成清晰准确的文字,适合广告、漫...

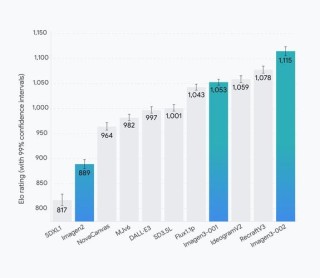
Imagen 3是Google推出的AI图像生成模型,可以生成高质量、逼真的图像。Imagen 3对提示词理解更好,可捕捉更多细节,生成更广泛的视觉风格。基于谷歌的文生图模型Imagen 3的产品ImageFX,现已开放使用...
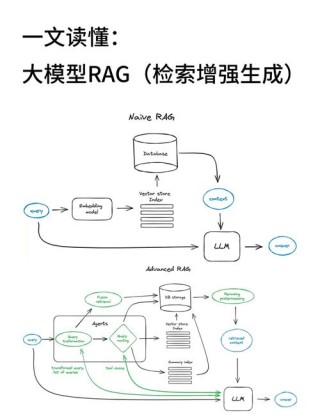
ImageRAG 是基于检索增强生成(Retrieval-Augmented Generation, RAG)的图像生成技术,通过动态检索相关图像来提升文本到图像(T2I)模型生成罕见或未见概念的能力。基于现有的图像条件模型...

ImagePulse (图律脉动)是魔搭社区推出的开源项目,为下一代图像理解和生成模型提供数据集支持,通过原子化模型的能力并构建原子能力数据集。项目包含多个原子能力数据集,例如“修改、添加、移除”“放大、缩小”“风格迁移”和...
ImageBind是Meta公司推出的开源多模态AI模型,将文本、音频、视觉、温度和运动数据等六种不同类型的信息整合到一个统一的嵌入空间中。模型通过图像模态作为桥梁,实现其他模态数据的隐式对齐,无需直接的模态间配对数据。...

Image-01 是 MiniMax 推出的先进文本到图像生成模型,具备卓越的图像生成能力。能将用户输入的文本描述精准转化为高质量图像,支持多种纵横比和高分辨率输出,适合从社交媒体到专业商业项目的广泛应用。...

全部评论
留言在赶来的路上...
发表评论