

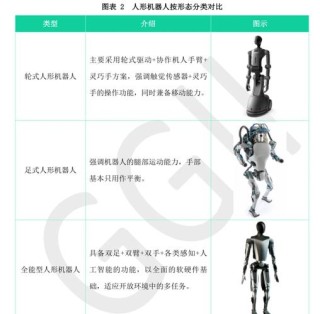
拜读维拉科技关于机器人相关信息的综合整理,涵盖企业排名、产品类型及资本市场动态:一、中国十大机器人公司(综合类)优必选UBTECH)聚焦人工智能与人形机器人研发,产品覆盖教育、娱乐及服务领域,技术处于行业前沿。基于光响应的人造皮肤用于机器人之间的化学通信机器人中科院旗下企业,工业机器人全品类覆盖,是国产智能工厂解决方案的核心供应商。埃斯顿自动化国产工业机器人龙头,实现控制器、伺服系统、本体一体化自研,加速替代外资品牌。遨博机器人(AUBO)协作机器人领域领先者,主打轻量化设计,适用于3C装配、教育等柔性场景。埃夫特智能国产工业机器人上市第一股,与意大利COMAU深度合作,产品稳定性突出。二、细分领域机器人产品智能陪伴机器人Gowild公子小白:情感社交机器人,主打家庭陪伴功能。CANBOT爱乐优:专注0-12岁儿童心智发育型亲子机器人。仿真人机器人目前市场以服务型机器人为主,如家庭保姆机器人(售价10万-16万区间),但高仿真人形机器人仍处研发阶段。水下机器人工业级产品多用于深海探测、管道巡检,消费级产品尚未普及。基于光响应的人造皮肤用于机器人之间的化学通信资本市场动态机器人概念股龙头双林股份:特斯拉Optimus关节模组核心供应商,订单排至2026年。中大力德:国产减速器龙头,谐波减速器市占率30%。金力永磁:稀土永磁材料供应商,受益于机器人电机需求增长。行业趋势2025年人形机器人赛道融资活跃,但面临商业化落地争议,头部企业加速并购整合。四、其他相关机器人视频资源:可通过专业科技平台或企业官网(如优必选、新松)获取技术演示与应用案例。价格区间:服务型机器人(如保姆机器人)普遍在10万-16万元,男性机器人13万售价属高端定制产品。
化学是一种普遍存在于自然界的现象,它涉及化学信号的释放、转移和识别等过程,从而被广泛用于生命个体之间信息的传递。例如,植物使用化学信号来吸引授粉者或驱赶食草动物,一些昆虫或哺乳动物则可以使用化学信号来寻找配偶或标记其领地。这些现象引起了研究者们的广泛兴趣,并被试图用于或等人造系统。
为了开发机器人的化学,其中一个关键是使它们能够以一种稳健、适应性强的方式感知环境并与之交互。最行之有效的方法之一是引入基于电的传感,它能赋予机器人感知环境中电荷的能力。然而,仅仅依靠电传感仍然不足以管理机器人之间的交互,学者们需要寻找控制机器人释放化学物质的方法,从而控制信号的发射以实现更全面的机器人之间的通信。

图1 机器人通过皮肤接触并在输入信号控制下实现化学信号的释放、接收和识别的示意图
近期,来自荷兰埃因霍温理工大学(Eindhoven University of chnology)的刘丹青教授和Dirk J. Broer教授团队开发了一种基于光响应的人造皮肤,实现了化学信号物质的控制释放、传递和接收。这种人造皮肤由液晶聚合物网络制备而成,其中,信号化学物质被预先装载在人造皮肤中,可以通过光照触发皮肤收缩变形来释放信号化学物质。此外,皮肤中内置了一个固有的传感器,用于感知环境电荷信号。当其接收到来自其他机器人皮肤释放的化学物质时,作为接收端的机器人皮肤可以表现出透明度变化和电信号变化。该研究设计的人造聚合物皮肤层间的化学通信的方法不仅能够使化学物质在两个涂层之间转移,还可以通过不同的路径实现涂层之间的多重转移,将这种方法提升到了更先进的水平。
此外,每两个涂层中的载荷可以是不同的化学物质。化学物质在皮肤之间转移后,会发生反应,生成所需的新的化学物质。这一功能极大地增强了这种机器人感知系统的复杂性和微妙性,为机器人控制和交互的新可能性铺平了道路。该工作以“Facilitang Inter-Skin Communication in Artificial Polymer Systems through Liquid Transfer”为题发表在《vanced Materials》期刊上。埃因霍温理工大学博士生张东钰为论文第一作者,埃因霍温理工大学刘丹青教授为论文通讯作者 。
人造智能皮肤的光调控化学信息释放原理
使智能皮肤从发送端释放化学信息物质的原理是基于紫外光诱偶氮苯的顺反异构化。具体来说,偶氮苯异构化使液晶分子有序度降低,液晶聚合物沿着分子取向方向收缩,并在垂直于取向方向的平面膨胀。在涂层配置中,由于对刚性基材的强粘附力,面内膨胀受到限制。因此,垂直排列的聚合物涂层的厚度减少了5%,进而导致孔隙收缩并对液体施加压力,从而排出液体化学物质。其中液体释放的速率可以通过改变光源的强度来进行微调。

图2 人造智能皮肤的结构设计及光响应性液体物质的控制释放原理
人造智能皮肤化学信息接收端的感应
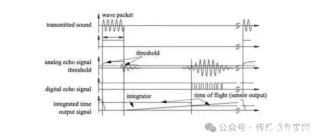
为实现对接收到化学物质的感应,研究者将人造皮肤制备在带有叉指电极(IDE)阵列的基板上,该阵列通过基于接收物质电荷产生的电信号变化检测传输液体的量。这里连接着人造皮肤的叉指电极两端的动态被实时监测,当有化学物质被接受到时,电阻产生瞬时下降。通过拟合电阻值和接收到液体化学物质含量的函数,电阻值成为可以被解析的信号。
不仅如此,该化学信号传输过程被可视化,研究者将的IDE与发光灯泡及直流连接来创建串联电路。当接收到液体化学物质后,接收器的电阻骤降,并引起电路中的增大,从而启动灯泡发光。

图3 基于电荷信号感应实现化学通信过程中的信息接收
人造智能皮肤通过化学反应实现图案化信息传递和接收
为了进一步开发该化学信号传输系统,研究者向发送端和接收端涂层分别填充了载有硫氰化钾和三氯化铁的液体。选择这些特定试剂是因为它们能够反应产生有色产物,促进直接视觉信号传导。图4清楚地表明,在暴露于紫外线照射下时,液体传输使得涂层接触的区域几秒钟内就会产生强烈的红色。
在此过程中,研究者继续升级了装置设计,在输入光源信号和发送端涂层之间插入光掩模,如图4所示。当光信号输入到发送端后,光掩模上包含的图像信息就会被印到接收器。印记在接收端皮肤上的图像可以停留1小时以上,并且可以用水擦除。通过利用这种远距离传输方法,可以实现500 µm的图像打印分辨率。

图4 化学反应用于化学通信中图案化信息的接收
总体而言,该项工作为智能通信材料的开发提供了一种思路,该方法成功地了生物传感系统中复杂的交互过程,从而为机器人传感和控制相关领域的新发展铺平了道路。未来的努力将致力于探索智能皮肤中嵌入多个传感器的协调性及其更好的适应性,使机器人在各种复杂场景中更具协作性和高效性。
论文链接: https://doi.org/10.1002/adma.202312428
审核编辑:刘清





全部评论
留言在赶来的路上...
发表评论