

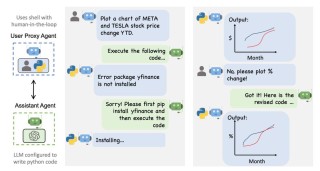
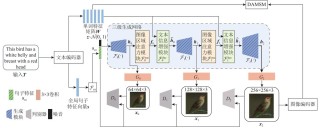
Helix 是 Figure 推出的通用视觉-语言-动作(VLA)模型,用于人形机器人的控制。Helix首创性地实现对机器人整个上身(包括手腕、躯干、头部和手指)的高速率(200Hz)连续控制,支持多机器人协作,多个机器人共用同一组神经网络权重完成任务。Helix 基于自然语言指令拿起从未见过的物品,表现出强大的泛化能力。Helix 的训练完全端到端,无需任务特定的微调,在低功耗 GPU 上运行,具备商业部署潜力。

(图片来源网络,侵删)

(图片来源网络,侵删)
Helix 是 Figure 推出的通用视觉-语言-动作(VLA)模型,用于人形机器人的控制。Helix首创性地实现对机器人整个上身(包括手腕、躯干、头部和手指)的高速率(200Hz)连续控制,支持多机器人协作,多个机器人共用同一组神经网络权重完成任务。Helix 基于自然语言指令拿起从未见过的物品,表现出强大的泛化能力。Helix 的训练完全端到端,无需任务特定的微调,在低功耗 GPU 上运行,具备商业部署潜力。

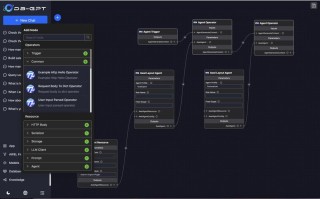
II-Agent 是开源的Agent框架,通过与大型语言模型(LLM)的交互,简化和提升跨多个领域的工作流程。具备多种核心功能,包括研究与事实核查、内容生成、数据分析与可视化、软件开发、工作流自动化以及问题解决等。...

IFAdapter是一种新型的文本到图像生成模型,由腾讯和新加坡国立大学共同推出。提升生成含有多个实例的图像时的位置和特征准确性。传统模型在处理多实例图像时常常面临定位和特征准确性的挑战,IFAdapter通过引入两个关键组...


IDM-VTON是由韩国科学技术院和OMNIOUS.AI的研究人员提出的一种先进的AI虚拟试穿技术,通过改进扩散模型来生成逼真的人物穿戴图像,实现更真实的虚拟试穿效果。...

IDIFY是一款免费开源的在线证件照生成工具,通过AI技术实现自动抠图,帮助用户快速生成符合标准的证件照。用户只需在浏览器中上传照片,选择尺寸和背景色,可下载高清证件照。...


ID-Animator是由来自腾讯光子工作室、中科大和中科院合肥物质科学研究院的研究人员推出的一种零样本(zero-shot)人类视频生成技术,能够根据单张参考面部图像生成个性化视频,同时保留图像中的人物身份特征,并能够根据...

ICEdit(In-Context Edit)是浙江大学和哈佛大学推出的指令式图像编辑框架。基于大规模扩散变换器(Diffusion Transformer)的强大生成能力和上下文感知能力,用自然语言指令对图像进行精准编辑。...
IC-Portrait是新型的个性化肖像生成框架,解决用户资料图像多样性(如外观和光照条件差异)带来的挑战。通过将肖像生成任务分解为“光照感知拼接”和“视角一致性适应”两个子任务来实现高保真的身份保留和视角一致性。...
IC-Light是一款由ControlNet作者张吕敏开发的AI图像打光处理工具,可以对图片进行光源操纵和光影重构,实现与不同背景的完美融合。用户只需上传图片,选择光源方向并输入提示词,IC-Light便能自动抠图并生成融合...
全部评论
留言在赶来的路上...
发表评论